

1. Общий обзор
В данном документе описывается принцип работы изделия, его основные показатели и особенности использования.
Основным содержанием данного документа являются:
Введение в систему позиционирования и ориентации на местности GSY-POS1A;
Принцип работы системы позиционирования и ориентации на местности GSY-POS1A;
Краткое представление системы позиционирования и ориентации на местности GSY-POS1A;
Знакомство с системным программным обеспечением для GSY-POS1A;
Использование системы направленного позиционирования для GSY-POS1A;
2. Срок
FOG | Волоконно-оптический гироскоп |
IMU | Инерциальный измерительный блок |
INS | Инерциальная навигационная система |
SINS | Инерциальная навигационная система |
GPS | Глобальная система позиционирования |
3. Внедрение системы наземного направленного позиционирования
3.1 принцип работы
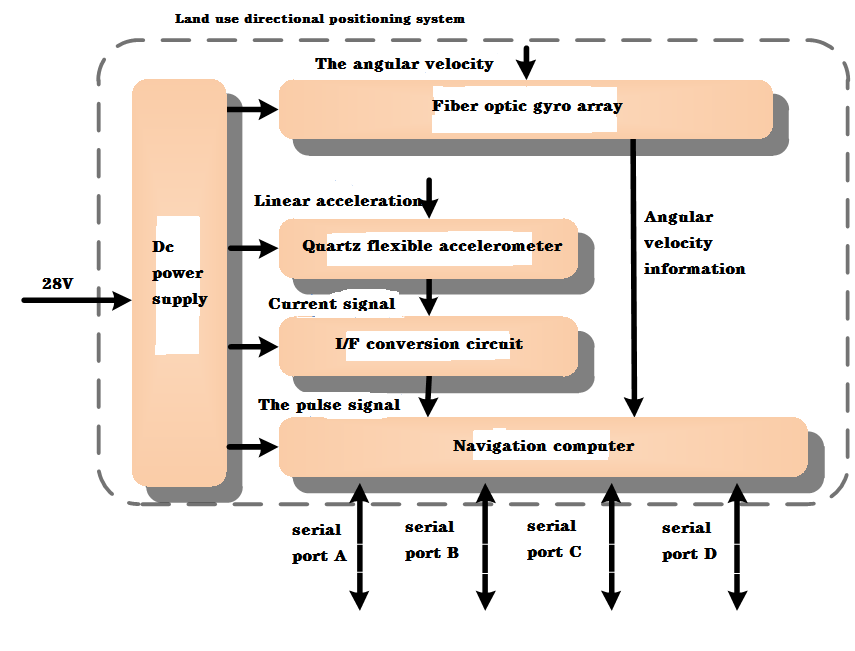
В наземной системе позиционирования и ориентации GSY-POS1A используется трехкоординатный оптоволоконный гироскоп, чувствительный к угловому движению носителя, который выдает цифровой сигнал, пропорциональный угловой скорости движения носителя, текущий сигнал преобразуется в частотный через схему преобразования I/ F в частотный сигнал для ввода в навигационный компьютер. Навигационный компьютер завершает прием данных гироскопа, акселерометра, внешнего GPS, расчет компенсации ошибок системы, навигацию и расчеты и через порт мониторинга в заданный период времени передает наружу скорость, положение, ориентацию и другую навигационную информацию в реальном времени.

Рис.1 Система позиционирования и ориентации на местности GSY-POS1A
3.2 Форма
Система позиционирования и ориентации на местности GSY-POS1A
(1): встроенный трехосевой волоконно-оптический гироскоп, три кварцевых гибких акселерометра и одноосный механизм поворота. Навигационный компьютер завершает прием данных гироскопа, акселерометра, внешнего GPS, расчет компенсации ошибок системы, навигационный расчет и передает через порт мониторинга навигационную информацию в реальном времени, такую как скорость, положение и ориентация, в течение заданного периода времени.
Спутниковая антенна
(2): изделие оснащено 2 антеннами позиционирования GNSS (BD опционально);
Фидер
(2): оба конца антенного фидера представляют собой головку TNC, стандартные 5 метров, один конец подключен к спутниковой антенне, другой - к основному изделию;
Кабель данных/питания (3): 1 кабель данных, поддерживает один интерфейс RS-232, два интерфейса RS-232 / RS-422 (настраиваемый), один интерфейс USB, один интерфейс CAN, четыре интерфейса одометра, один интерфейс PPS; кабель питания, поддерживает номинальное питание 24 В постоянного тока, подходит для широкого диапазона напряжения 10~32 В постоянного тока; сетевой кабель.
Программное обеспечение ПК: с помощью программного обеспечения ПК можно анализировать данные протокола, возвращаемые устройством, отображать навигационные данные в реальном времени и сохранять их.
3.3 Функции и область применения
Основные функции системы наземного позиционирования и ориентации серии GSY-POS1A включают:
1) измерение угловой скорости и ускорения;
2) функция самопоиска;
3) функция отслеживания ориентации;
4) объединение функции навигации;
5) последовательная связь RS-422/RS232.
Система наземного позиционирования и ориентации GSY-POS1A может выполнять прием данных гироскопа, акселерометра, внешнего GPS, расчет компенсации системных ошибок, навигационный расчет, а также передавать через порт мониторинга скорость и положение в реальном времени в течение заданного периода. Аттитюд и другую навигационную информацию. Это динамический режим работы с высокой точностью и хорошей надежностью. Он обеспечивает передачу информации о движении, скорости и положении транспортного средства. Для запуска ракет, наведения оружия, радаров, антенн, транспортных средств и других динамических начальных установок, статических начальных установок, управления направлением и других объектов.
3.4 Основные параметры работы
режим чистой навигации
Начальное выравнивание GSY-POS1A подразделяется на два способа установки блока - статическое выравнивание и двухпозиционное выравнивание. Точность позиционирования при двухпозиционном выравнивании выше, чем при статическом выравнивании.
l Точность выравнивания по азимуту: 0. 01 ° с (Φ), (1 σ с учетом местной широты);
l Точность выравнивания горизонтальной ориентации: ≤ 0,02 °(1 σ);
l Точность азимута: 0,05 °/час;
l Точность удержания горизонтальной ориентации: 0,03 °/час;
l Точность позиционирования (50% КЭП): 1992 нм/час (10 мин статического выравнивания);
l Точность определения горизонтальной скорости (RMS): ≤ 2 м/с (10 мин статического выравнивания);
l Точность позиционирования (50% КЭП): 1 нм/час (двухпозиционное выравнивание, время выравнивания менее 30 мин);
l Точность горизонтальной скорости (среднеквадратичное значение): ≤ 1м/с (двухпозиционное выравнивание, время выравнивания менее 30мин);
Режим вспомогательной навигации GPS
l Точность выравнивания по азимуту: {0. 01° сек (1σ,Φ с учетом местной широты);
l Точность выравнивания горизонтальной ориентации: ≤ 0,02 °(1 σ);
l Точность удержания азимута: ≤ 0. 05 °с (Φ) (1 σ, Φ - местная широта);
l Точность удержания горизонтальной ориентации: ≤ 0,01 °(1 σ);
l Точность позиционирования: ≤ 5 м (1 σ);
l Точность определения скорости: ≤ 0,1 м/с (1 σ).
4. Краткое описание программы
Внутренний инерциальный измерительный блок (INERTIAL MEASUREMENT UINT-IMU) системы позиционирования ориентации на местности GSY-POS1A состоит из трехосного волоконно-оптического гироскопа, трех кварцевых гибких акселерометров и одноосного механизма вращения.
4.1 Волоконно-оптический гироскоп
Волоконно-оптический гироскоп (ВОГ) представляет собой волоконно-оптический интерферометр, основанный на эффекте Саггера-Найка (Сагнака), который состоит из двух пучков интерференции, распространяющихся в одном чувствительном кольце оптического волокна, которое образует волоконно-оптический интерферометр Сагнака, как показано на рис. 2.

Рис. 2 Принципиальная схема волоконно-оптического гироскопа
С помощью разветвителя / сумматора лучей от источника света разделяется на два луча, которые попадают в волоконную чувствительную катушку с обоих концов оптоволоконной петли и распространяются по часовой и против часовой стрелки. Два луча света с обоих концов оптоволоконной петли накладываются с помощью разветвителя / сумматора лучей, создавая интерференцию. результирующая разность фаз пропорциональна угловой скорости вращения кольца:
 …………………………………………(1)
…………………………………………(1)
Из них,
L длина волокна;
D средний диаметр волоконного кольца;
Длина волны света в вакууме;
Скорость света в вакууме
Информация об угловой скорости может быть получена путем детектирования разности фаз (т.е. интенсивности интерференционного света), где член - масштабный коэффициент гироскопа.

Рис. 3 Схема реального объекта оптоволоконного кольца
В оптическом гироскопе используется высокоточный трехосевой оптический гироскоп, в оптическом гироскопе применено полноцифровое решение оптического гироскопа с замкнутым контуром, а часть оптического тракта состоит из источника света, соединителя, интегрированного Y-волновода, чувствительного кольца из оптического волокна и детектора. В схеме общего легированного волоконного источника света три витка оптического волоконного чувствительного кольца соответственно чувствительны к угловому перемещению в трех направлениях, а обработка сигналов и вывод информации об угловой скорости завершаются соответствующей печатной платой.

Рис. 4 Блок-схема источника света
В процессе разработки были внедрены несколько ключевых технологий, таких как технология источника света на основе легированного эрбием волокна, технология нулевого старта и технология контроля погрешности масштабного коэффициента, благодаря чему волоконно-оптический гироскоп работает в диапазоне температур от -10 ℃ до 50 ℃ при условии нулевого старта. Стабильность смещения нуля лучше, чем 0,02 / ч (1 σ).
Основные технические показатели следующие:
Время подготовки: 15 с;
Стабильность смещения нуля (среднее время 100 с)≤0,02/ч(1σ);.
Повторяемость смещения нуля (стабильная среда, среднее время 100 с)≤0,02(1σ)/ч;
Коэффициент случайного отклонения ≤ 0,005 ;
Нелинейность масштабного коэффициента ≤ 50 ppm;
Повторяемость масштабного коэффициента ≤ 50 (1 σ) ppm;
Диапазон измерения гироскопа не менее ±300 / с.
Применить | Трудоемкость измерений | подвижность дрейфа(%) | класс точности |
Тактическая ракета, ракета-носитель, катер-носитель | В соответствии с потребностями, | >10 | Низкая точность (общий контроль) |
Ракета средней и малой дальности, самолет общего назначения, спутник | >100(o)/s | 1~10 | Средняя точность (тактический уровень) |
Ракета средней дальности, самолет общего назначения, спутник | >100(o)/s | 0.1~1.0 | Средняя точность (тактический уровень) |
Ракеты большой дальности, военные самолеты, подводные лодки, спутники | >100(o)/s | 0.01~0.1 | Средняя точность (тактический уровень) |
Ракета стратегического назначения, космический челнок, подводная лодка, спутник | >10(o)/s | 0.001 | Высокая точность (инерциальный навигационный блок) |
4.2 Акселерометр
В качестве акселерометра используется кварцевый гибкий акселерометр. Кварцевый гибкий акселерометр представляет собой механический маятниковый силовой балансировочный акселерометр, состоящий из двух частей: головки и сервоцепей. Головка состоит из встроенного кварцевого гибкого маятника, верхнего и нижнего моментных устройств, поясного ремня и изолирующего кольца, корпуса и других деталей. Сервоцепь представляет собой гибридную интегральную схему, состоящую из генератора опорной треугольной волны, дифференциального детектора емкости, интегратора тока, усилителя компенсации транскондуктивности и регулятора напряжения.
Акселерометр установлен на носителе. При ускоренном движении носителя относительно инерциального пространства по оси входа акселерометра маятник акселерометра будет создавать момент инерции, и:
Mg =mLai …………………………………………(2)
Из них,
Mg-измерение момента инерции маятника с массой;
М- проверка качества маятника;
L- измерение расстояния между центром масс маятника и гибким шарниром;
Ai- акселерометры вводят ускорение вдоль оси.
Под действием момента инерции маятник с измерительным качеством производит угловое смещение вокруг гибкого стержня. Под действием углового смещения дифференциальный датчик емкости выдает значение разности емкостей при малом угловом смещении:
Δc =KpΔα…………………………………………(3)
Из них,
Δ c-разность емкостей;
Kp- коэффициент передачи дифференциального датчика емкости, близкий к нулю;
Δ a - угловое перемещение маятника.
Разность емкостей преобразуется сервоцепью в токовый сигнал, и генератор крутящего момента с токовым выходом создает электромагнитный момент обратной связи.
Mt =Kt I …………………………………………(4)
Из них,
Момент обратной связи моментного устройства Mt/ F;
коэффициент момента бесщеточного моментного устройства Kt;
I - ток, проходящий через катушку торка.
Когда Mt = Mg:
I=(mL/Kt )ai…………………………………………(5)
Из них,
ML/Kt - коэффициент масштабирования тока, необходимый ток обратной связи при входном ускорении 1 g.
Когда момент обратной связи торкера уравновешивается моментом инерции маятника с детектируемой массой, ток, необходимый в катушке торкера, пропорционален входному ускорению. Поэтому ускорение носителя вдоль оси входа акселерометра может быть измерено путем измерения величины тока, протекающего через катушку торкера при уравновешивании крутящего момента.
Основные технические показатели следующие:
Диапазон измерений: -20g~+20g;
Пороговое значение: не более 5×10-6 г;
Месячная повторяемость масштабного коэффициента: не более 3,5×10-5 (1σ);
Температурный коэффициент масштабного коэффициента: не более 6×10-5/℃(-40°C~+60°C);
Коэффициент нелинейности второго порядка: не более 3×10-5г/г2;
Величина отклонения: не более 6×10-3г;
Температурный коэффициент отклонения: не более 2,5×10-5г/℃(-40°C~+60°C);
Месячная повторяемость: не более 2,5×10-5г (1с);
Полоса пропускания: не менее 800 Гц.
5. индекс производительности
Система наземного позиционирования и ориентации GSY-POS1A включает в себя множество режимов навигации и может быть интегрирована с GPS.
5.1 Режим чистой навигации
Первоначальное выравнивание GSY-POS1A можно разделить на два способа: однопозиционное статическое выравнивание и двухпозиционное выравнивание. Точность позиционирования при двухпозиционном выравнивании выше, чем при однопозиционном статическом выравнивании.
Точность выравнивания по азимуту: ≤0,01°сек (Φ) (1σ, Φ - местная широта);
Точность выравнивания по горизонтали: ≤0,02° (1σ);.
Точность азимута: 0,05°/ч;
Точность удержания горизонтальной ориентации: 0,03°/ч。
Точность позиционирования (50% КЭП): ≤2 нм/ч (10 мин статического выравнивания);
Точность определения горизонтальной скорости (среднеквадратичное значение): ≤2м/с (10мин статического выравнивания);
Точность позиционирования (50% CEP): ≤1 нм/ч (двухпозиционное выравнивание, время выравнивания менее 30 мин);
Точность определения горизонтальной скорости (среднеквадратичное значение): ≤1м/с (двухпозиционное выравнивание, время выравнивания менее 30 мин).
5.2 Режим вспомогательной навигации GPS
Точность выравнивания по азимуту: ≤0,01°сек (Φ)(1σ, Φ - местная широта);.
Точность выравнивания горизонтальной ориентации: ≤0.02°(1σ);
Точность удержания азимута: ≤0.05°сек(Φ)(1σ, Φ - местная широта);
Точность удержания горизонтальной ориентации: ≤0,01° (1σ).
Точность позиционирования: ≤5 м (1σ);
Точность определения скорости: ≤0,1 м/с (1σ).
5.3 Прочее
Размер формы: 248×248×180 [может быть изготовлен по требованию заказчика];
вес: ≧20 кг;
Частота измерения данных: 20Гц~2000Гц;
Электропитание: AC220V 50 Гц / AC110V 60 Гц / DC18V ~ 36 v;
Потребляемая мощность: менее 50 Вт
Рабочая температура: -40℃~+60℃;
температура хранения: -45℃~+80℃。
6. Первоначальное выравнивание
Процесс юстировки системы позиционирования и ориентации на местности GSY-POS1A состоит из двух этапов: грубой юстировки и точной юстировки.
6.1 Грубое выравнивание
Первые 130 с после включения инерциальной навигационной системы являются этапом грубого выравнивания. Для получения лучшего эффекта выравнивания необходимо постараться обеспечить отсутствие разгонного движения на этом этапе, но не ограничивать колебательное движение (например, состояние холостого хода автомобиля).
6.2 Точное выравнивание
Через 180 с инерциальная навигационная система автоматически переходит на этап точного выравнивания.
При точной юстировке используется алгоритм двухпозиционного выравнивания, т.е. в процессе юстировки курс изделия должен быть изменен дважды. При условии, что опорная информация о юстировке (GPS/DVL) эффективна, носитель может двигаться без ограничений, но для достижения более высокой точности юстировки рекомендуется следующий маршрут юстировки: один маневр (изменение курса более 70°) на инерциальной навигационной системе (10 мин) и второй маневр примерно через 20 мин (курс носителя восстанавливается до прямого целевого направления). Процесс маневрирования показан на рис. II-1.

Рис. 5 Схема рекомендуемого маршрута выравнивания
Если справочная информация недостоверна, то для точного выравнивания можно изменить курс на месте.
Время выравнивания составляет 1400 м 1600 с. Если справочная информация недействительна, то время выравнивания соответственно увеличивается.
7. Определение интерфейса
7.1 Определение системы координат
Несущая система координат (b-система)──: Начало несущей системы координат O выбирается в инерциальном навигационном центре, ось Xb находится впереди продольной оси, ось Yb горизонтальна и направлена вправо, образуя правостороннюю систему координат. Установка гироскопов и акселерометров производится в соответствии с несущей системой координат.

Рис. 6 Схема определения системы координат
Географическая система координат (система t)── Начало географической системы координат O выбирается в центре тяжести носителя, направление на север, направление на небо в вертикальном направлении, направление на восток.
Навигационная система координат (система n)──Навигационная система координат совпадает с географической системой координат.
При установке системы наземного позиционирования и ориентации GSY-POS1A на носитель ось X должна совпадать с продольной осью носителя.

Рис. 7 Установка GSY-POS1A на носителе
Углы ориентации GSY-POS1A определяются, как показано на рис. II-5:
Угол поворота против часовой стрелки - положительный, по часовой стрелке - отрицательный-180º~+180º | |
Угол продольного наклона Головой вверх - положительный, носом - отрицательный - 90º~90º | |
Положение вала Правый наклон в положительную сторону, левый - в отрицательную-180º~180º |
|



Рис. 8 Определение угла установки
Сообщение Просмотров: 0
Поделиться статьей