





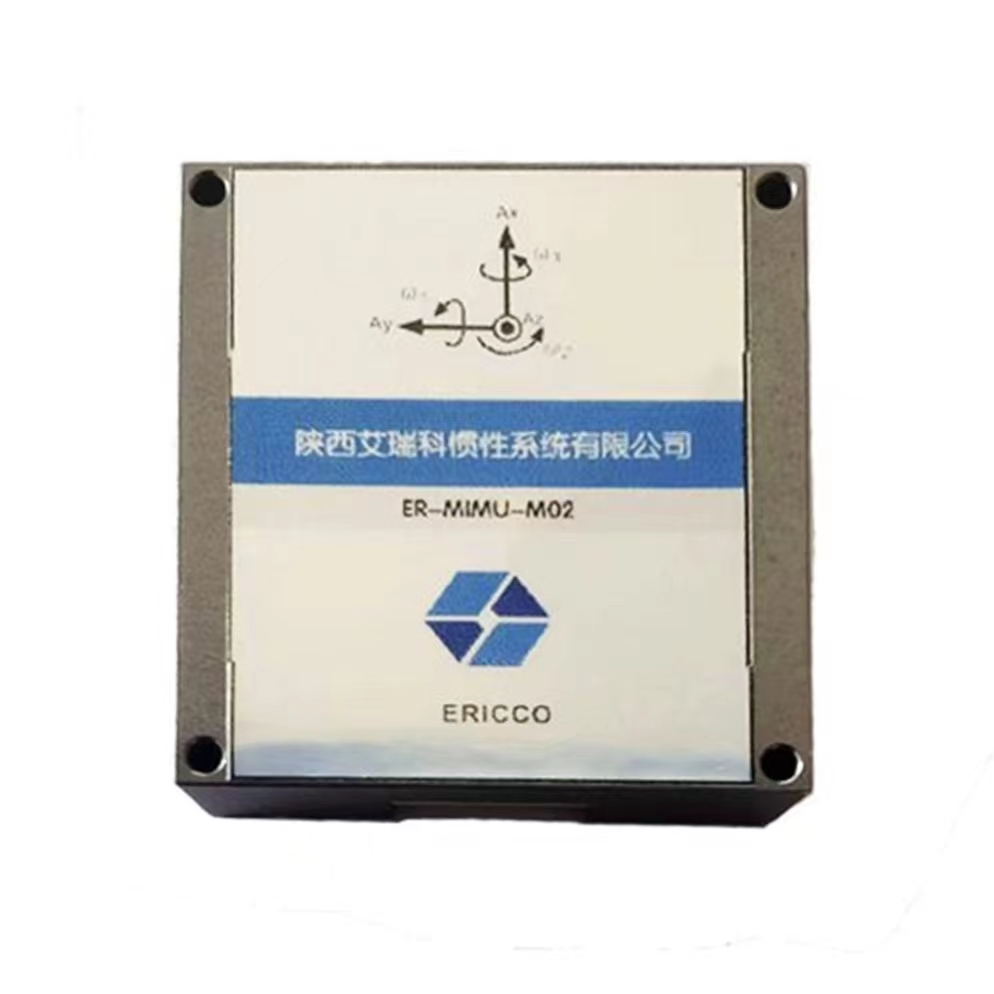
IMU Inertial Measurement Unit
Inertial Measurement Unit, referred to as IMU, is a device to measure the attitude angle (or angular velocity) and acceleration of the three axis of the object. Gyroscope and accelerometer are the core devices of inertial navigation system (INS). With the built-in accelerometer sensor and gyroscope, the IMU can measure the linear acceleration and rotation angular velocity from three directions and can obtain the attitude, velocity and displacement information of the carrier through the resolving.
GSY-MIMU-04 uses MEMS accelerometer and gyroscope with high quality and reliability, RS422 and external communication, baud rate can be flexibly set between 9600~921600, through the communication protocol to set the user’s required communication baud rate. With X, Y, Z three-axis precision gyro, X, Y, Z three-axis accelerometer with high resolution, can be output by RS422 X, Y, Z three axis of gyroscope and accelerometer’s original hexadecimal complement data (including gyro hexadecimal complement the numerical temperature, angle, the accelerometer hexadecimal temperature, the acceleration hexadecimal complement number); It can also output float dimensionless values of the gyroscope and accelerometer processed by the underlying calculation.
Applications of IMU Inertial Measurement Unit
Construction machinery dip angle measurement, angle control, pylon operation monitoring, medical equipment angle control, satellite antenna star search, bridge, tall building, tower, dam monitoring and rock and soil monitoring, mining, attitude/heading reference system, integrated inertial navigation, Integrated Navigation Systems & Inertial Guidance System, Flight Control & Guidance System, Attitude Heading Reference Systems (AHRS), Stabilization of Antennas, Cameras & Platforms.
Features
Volume: 38.6 mm×44.8 mm× 21.8 mm;
5V power supply, low power consumption 1.0W;
light weight: 55g;
Products include X, Y, Z three axis MEMS gyro and X, Y, Z three axis MEMS accelerometer;
RS422 bus communication, baud rate from 9600~921600 can be set.
Specifications
| Item | Parameter | |
| Gyro Performance | ||
| Range | ±400°/s | |
| Bandwidth | 200Hz | |
| Scale factor | 20000lsb/deg/s | |
| Scale Factor Non-linearity | ≤200ppm | |
| Scale factor temp drift (1б) | 500 ppm | |
| Bias instability | ≤3°/h | |
| Bias Stability (10s,1σ) | ≤5°/h | |
| Bias Stability (1s,1σ) | ≤15°/h | |
| Bias Repeatability | ≤5°/h | |
| Bias temp drift (1б) | 50°/h | |
| Accelerometer Performance | ||
| Range | 30-50g | 70-100g |
| Bandwidth | 100 Hz | 100 Hz |
| Bias Stability (10s,1σ) | <50 μg | <100 μg |
| Bias Repeatability | 500-700 μg | 1000 μg |
| Bias Temp Coefficient | <50 μg/℃ | <100 μg/℃ |
| Bias Temp Hysteresis | <1 mg | <3 mg |
| Factor Scale Non-linearity | <1000 ppm | <1000 ppm |
| Factor Scale Repeatability | <300 ppm | <300 ppm |
| Factor Scale Temp Coefficient | 10 ppm/℃ | 10 ppm/℃ |
| Class II Non-linearity Coefficient | <100 μg/g² | <100 μg/g² |
| Factor Scale (Lsb/g) | 1.5-2*105 | 8-10*104 |
| System Performance | ||
| Supply Voltage | 5V | |
| Supply Consumption | 1W | |
| Interface | RS422 | |
| Vibration | 6.06g (10~2000Hz) | |
| Shock | 5000g, 0.1ms | |
| Operate Temp | -45℃~+ 85℃ | |
| Storage Temp | -55℃~+ 105℃ | |
| Weight | ≤55g | |
| Size | 44.8mm×38.6mm×20mm | |
FAQ:
1. What are the quotation methods?
If you have DHL or Fedex account, we can quote EXW price, otherwise CIF or FOB price.
2. Are there any discounts?
After we submit the sample price, if more quantity is needed, we will quote the bulk price.
3. How long will it take to deliver the goods after placing the order?
For sensors, parts and modules: in stock-one week; no stock-2-4 weeks; For systems, generally, 8-12 weeks.
4. How to deal with the quality problems?
After confirming that the product has quality problems, we will replace it for you free of charge in the shortest possible time.
If interested in Low Cost MEMS Inertial Measurement Unit, pls contact us: info@joinsunny.cn
Content related to MEMS Inertial Measurement Unit:

{kind=link}
{kind=link}